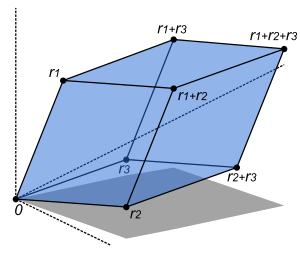
Objem trojrozměrného rovnoběžnostěnu sevřeného vektory , a .
Vnější součin[1] je v matematice (n-1)-ární operace násobení vektorů v n-rozměrném vektorovém prostoru se skalárním součinem. Výsledkem této operace je vektor kolmý ke všem násobeným vektorům a jeho velikost je rovna objemu (n-1) rozměrného rovnoběžnostěnu násobenými vektory sevřeného.
Definice
Mějme aritmetický vektorový prostor s ortonormální bází nad číselným tělesem , pak pro vektory platí, že vektor je vnějším součinem vektorů vzhledem k uvedené bázi, právě když:
,
symbolem značíme vnější součin a matice pro vznikly vynecháním i-tého sloupce matice:
kde dolní index označuje index vektoru a horní index označuje index jeho souřadnice vzhledem k dané bázi.
Mějme aritmetický vektorový prostor s kanonickou bází nad číselným tělesem , pak pro vektory platí, že vektor je vnějším součinem vektorů vzhledem k uvedené bázi, právě když:
, tj.:
,
přičemž smíšený součin a , tj. vektor je kolmý na vektory a a jeho velikost je rovna obsahu rovnoběžníku sevřeného násobenými vektory, tj. vektor je vektorovým součinem vektorů a .
Reference
↑BOURBAKI, Nicolas. Elements of mathematics, Algebra I. [s.l.]: Springer-Verlag, 1989. ISBN3-540-64243-9.Je zde použita šablona {{Citation}} označená jako k „pouze dočasnému použití“.








![{\displaystyle \mathbf {v} _{1}=\bigwedge (\mathbf {v} _{2},\dots ,\mathbf {v} _{n})=[(-1)^{1+1}detA_{1},\cdots ,(-1)^{n+1}detA_{n}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5af3fb659346403a2c858c2b51a11cd4dccfc082)








![{\displaystyle \mathbf {z} =\mathbf {x} \times \mathbf {y} =[{\begin{vmatrix}x_{2}&x_{3}\\y_{2}&y_{3}\\\end{vmatrix}},-{\begin{vmatrix}x_{1}&x_{3}\\y_{1}&y_{3}\\\end{vmatrix}},{\begin{vmatrix}x_{1}&x_{2}\\y_{1}&y_{2}\\\end{vmatrix}}]=[x_{2}y_{3}-y_{2}x_{3},y_{1}x_{3}-x_{1}y_{3},x_{1}y_{2}-y_{1}x_{2}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f8f3c04bcce01391b8c5333393a19f26f001d5b1)





 Obrázky, zvuky či videa k tématu Vnější součin na Wikimedia Commons
Obrázky, zvuky či videa k tématu Vnější součin na Wikimedia Commons 







